Zhenyu Hou - 侯振宇
I am a research assistant at the FASTLAB laboratory of Zhejiang University’s Huzhou Institute, mentored by Yanjun Cao, Fei Gao, and Chao Xu. I graduated with a Bachelor's degree in Cyber Security from the Civil Aviation University of China in June (2024), mentored by Zhijun Wu, And I am preparing to apply for PhD or Master of Research programs.
Research Interests
My research interests focus on field robots, aerial robots, trajectory planning and optimization, and SLAM. I am also very interested in unmanned aerial vehicles, drone swarms, humanoid robots, and quadruped robots, and I plan to integrate traditional robotic perception and planning with reinforcement learning in the future.
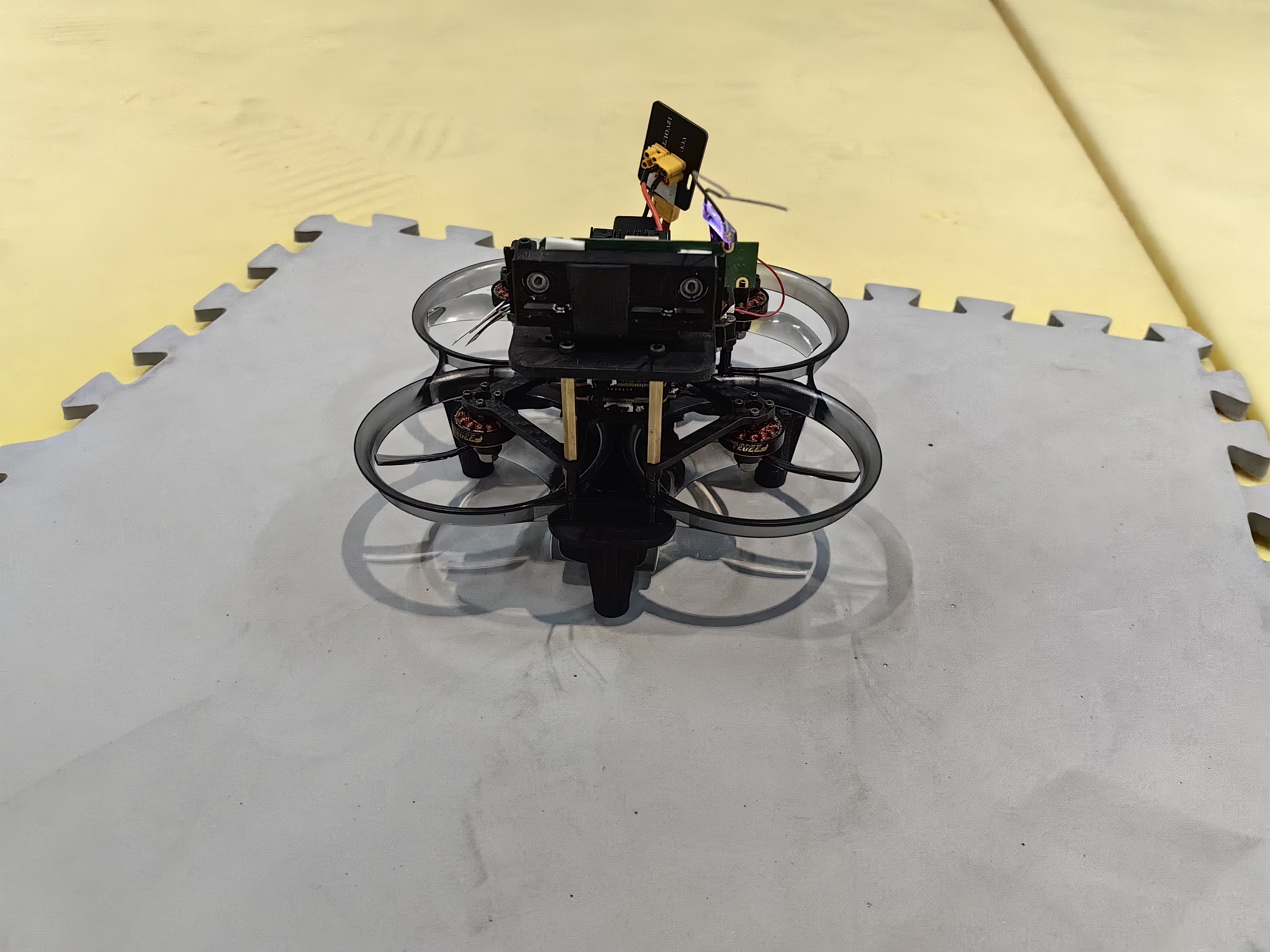
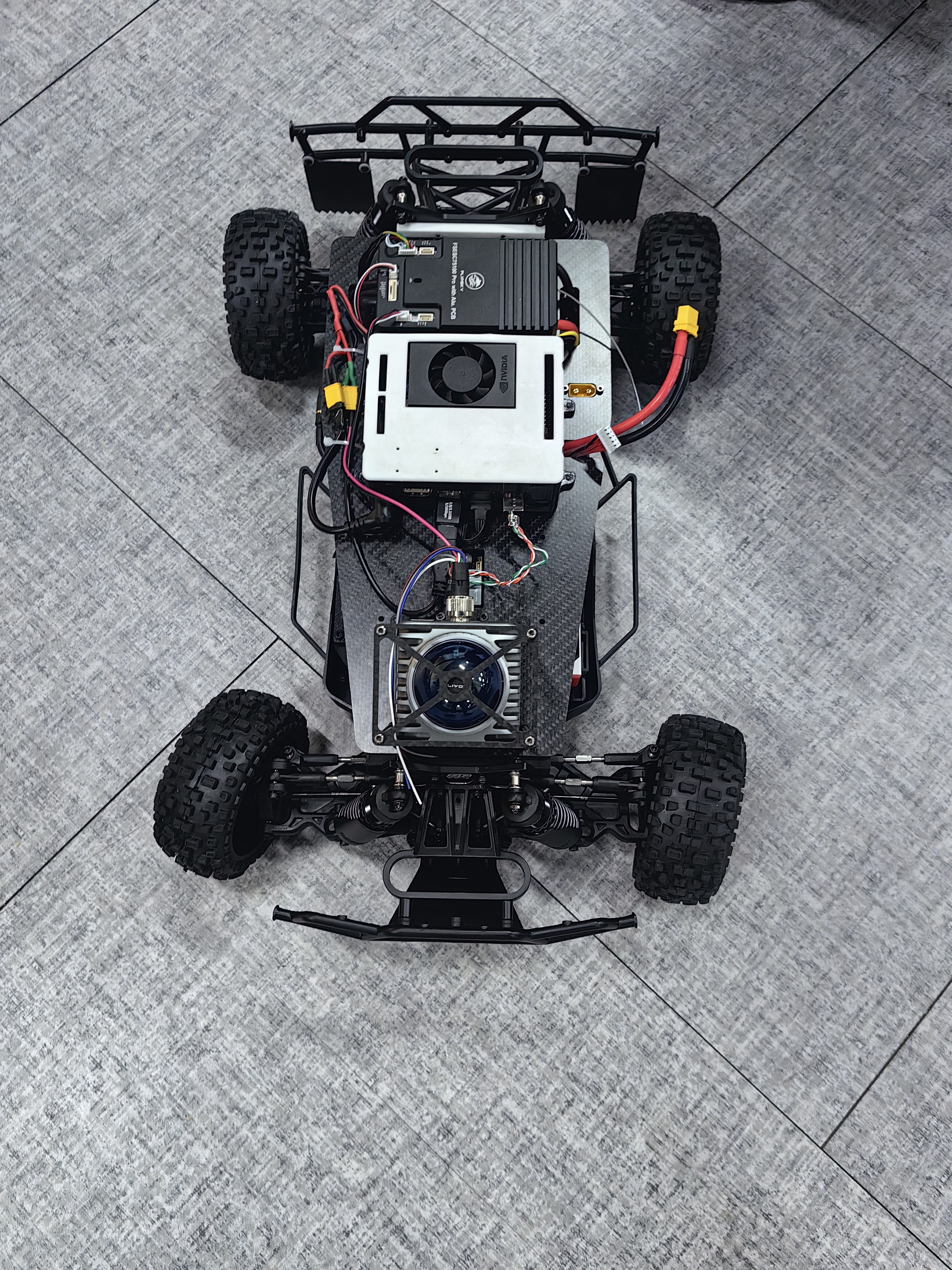
I have hands-on experience with a range of robotic platforms, including the Four-Eyed Fisheye Drone, VIO-Based Autonomous Drone, Autonomous Off-Road Differential Vehicles, Autonomous Off-Road Ackermann Vehicles, Mecanum Wheel Dual Gimbal Robot, and LIO-Based Autonomous Drone.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
My past research has primarily focused on developing drone path planning algorithms, drone localization and perception algorithms, and analyzing the traversability of ground robots on uneven terrain. Currently, I am particularly interested in integrating large vision-language models with traditional trajectory optimization to enable autonomous systems to perform complex, real-world tasks with greater efficiency and adaptability.
My current research interests include:
- Multi-Robot Systems
- Drone Swarm Perception and Planning
- Ground Robots for Uneven Terrain Navigation
- SLAM
- Autonomous Robot Exploration
Publications and Patents
-
From Gaussian Processes to Ellipsoidal Obstacles: Safety Control Barrier Functions and Model Predictive ControlThe 30th International Conference on Automation and Computing (ICAC 2025 Oral)
-
A Novel Algorithm for Ship Route Planning Considering Motion Characteristics and ENC Vector MapsJ. Mar. Sci. Eng. 2023, 11(6), 1102 PDF
-
Tracailer: An Efficient Trajectory Planner for Tractor-Trailer Vehicles in Unstructured EnvironmentsIEEE Transactions on Automation Science and Engineering (T-ASE), 2025 (Under Review)
-
An Omnidirectional Wheel-based Aircraft Cargo Hold Mechanical Damage Identification RobotChinese Invention Patent (Patent No.: CN116238703A)
-
A Rail-based Terminal Inspection RobotChinese Invention Patent (Patent No.: N116160430A)
-
A Mecanum Wheel-based Security Patrol RobotChinese Invention Patent (Patent No.: CN116238703A)