Journey to the Robotics
I am a magician who has stolen the power of computers and utilized it to bring my creative ideas to life and satisfy my diverse curiosity. For example, I have worked on ship route planning problems, written corresponding papers, and integrated planning algorithms into unmanned surface vehicles (USVs)/ships under different constraints. I have also used various methods, such as deep learning, machine learning, and embedded systems, to replace manual flame picking and ink smoke monitoring during Huizhou Ink production, contributing my share to the protection of intangible cultural heritage. Most importantly, motivated by a genuine passion for robotics, I founded my university’s first robotics lab and have dedicated myself to robotics research over the years. Now I am pursuing my dream of flying by designing and completing a set of autonomous high-speed flying vehicles with obstacle avoidance capabilities.
Remote grassland,Sandstorm,Robotics dream
Click image to enlarge



Since 2018, robotics learning and competitions have occupied most of my spare time. I come from a remote pastoral region—an underdeveloped nomadic area where, from a very young age, I lived amidst frequent sandstorms, unreliable transportation, and a harsh natural environment. In my hometown, people made their living through herding, and the landscape in spring and autumn was dominated by yellow dust, while winter brought nothing but the biting cold and snowy winds from Siberia. During those formative years, I was fortunate enough to catch a glimpse of the pan-Asian Robocon robotics competition on the news. Deeply inspired, I vowed to change this reality—to empower my community to embrace intelligent, technology-driven living, free from the constraints of nature. Fueled by that vision, I worked tirelessly in every exam at the village, county, city, and provincial levels, eventually earning admission to the best high school in Inner Mongolia. The year 2018, my freshman year, became the turning point of my life.
That same year, as part of the first—and only—robotics team in the history of Inner Mongolia, I participated in the FIRST Tech Challenge (FTC) youth robotics competition—sponsored by Qualcomm and Google. I traveled across China to events in Xi’an, Zhengzhou, Shanghai, and Suzhou, and even had the opportunity to compete on the world stage at the World Championship in Houston. There, I met people from every corner of the globe and forged deep bonds with international friends during the final competition. In that moment, the seed of a lifelong passion for robotics was irrevocably planted in my heart.
In the winter of 2019, I was honored to be among the few high school students invited to DJI’s robotics winter camp at their headquarters. There, I was introduced to competitive robotics in an adversarial setting, systematic robot fabrication, embedded systems, and visual algorithms. This invaluable experience not only enriched my technical foundation but also ignited the dream of establishing my very own robotics laboratory and team. I met inspiring peers from across the country and senior engineers from DJI—many of whom are now rising stars pursuing PhDs at top institutions or making groundbreaking contributions at companies like SpaceX, Apple, DJI and even founding multi-million-dollar unicorn startups.
College Year,Robotics Competition
Click image to enlarge


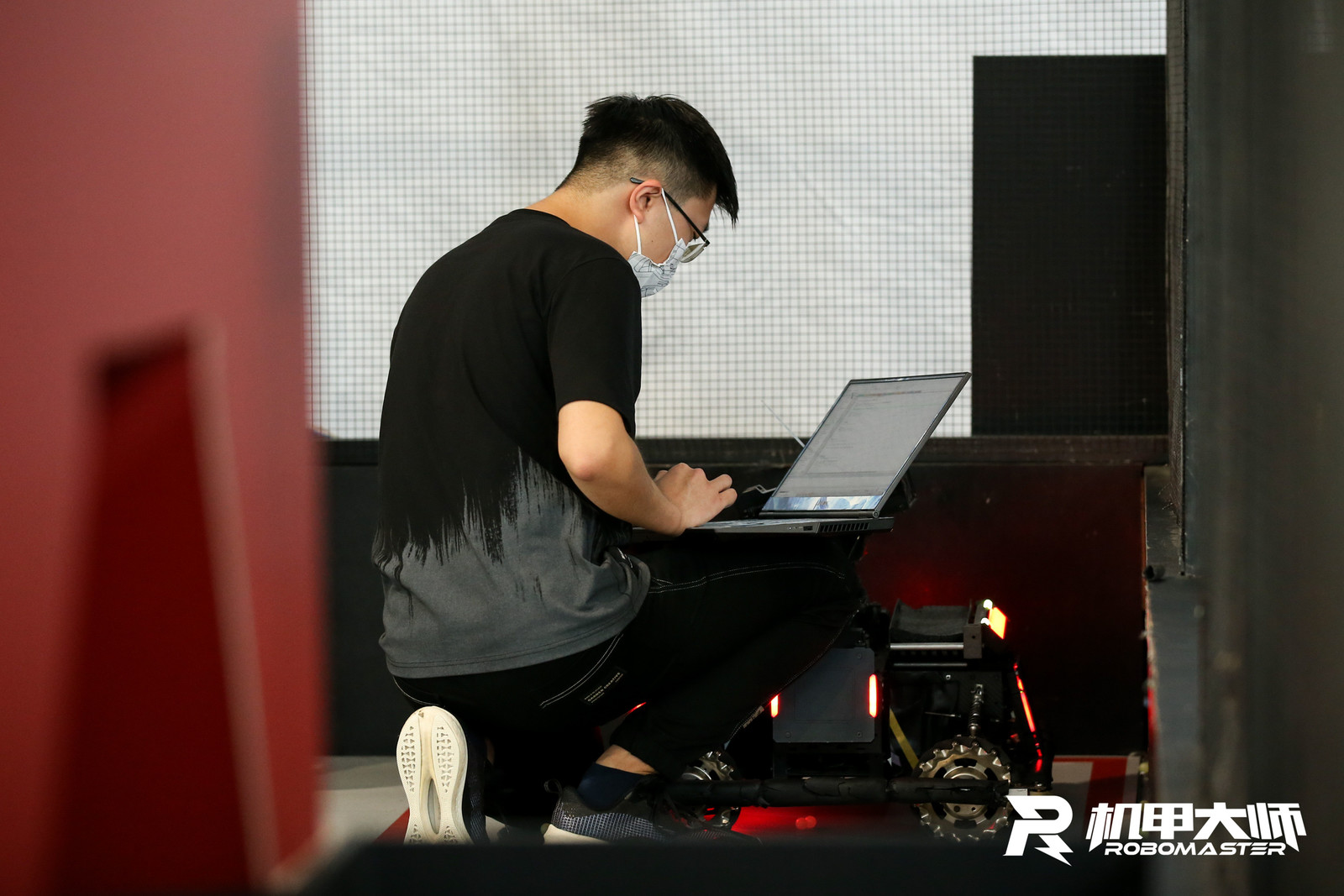
Armed with the passion and skills nurtured in high school, I went on to university with high hopes. Unfortunately, I soon found myself facing the worst of China’s COVID-19 outbreak, and due to an error choice in my college entrance examination selection system, I ended up at an institution with very limited robotics resources, forcing me to pursue a cybersecurity major—one that did not align with my true interests. So I decided to build my own lab.
In university, I built a competitive robotics lab and team much like launching a startup. I met countless individuals, faced innumerable challenges, and endured both disdain and disrespect—especially since my institution offered little support for competitions and the pandemic imposed additional restrictions. Despite having minimal prospects for academic advancement through competitions, I persisted out of a sense of honor and defiance.
Despite these challenges, I was determined to continue my robotics journey. In the early days of building our team, I had no money, no personnel, and almost no support from the school. For six long months, I persistently presented well-prepared proposals to department heads, laboratory directors, and even the university president. My relentless efforts eventually persuaded the Dean of the School of Electronic Information to provide initial financial support. Reuniting with teammates I had met before and enlisting the help of a graduate student, we managed to build our team from scratch. After three months of securing initial funds, we modeled our work on open-source projects and successfully built our very first robot.
Our early days were fraught with challenges. Lacking experience in cost control, mechanical design, and coding, our initial mechanical designs were made without proper consideration of processing costs, tolerances, or strength requirements. This resulted in significant unnecessary expenses and repeated structural failures—rendering our first prototypes unfit for competition. Similarly, our early control code was hastily written in a state machine without taking into account the communication protocols and wiring demands of the competition’s referee system. It was only later that we fully referenced open-source solutions (like DJI’s code) to develop a complete control system that met all competition requirements and could perform the majority of tasks.
On the visual front, while many teams relied on open-source systems and similar hardware, our inexperience led us initially to experiment with Python (inspired by Sichuan University’s vision system). However, due to Python’s speed limitations, we had to abandon that approach—a decision that cost us valuable time until we eventually adopted an open-source solution from Jilin University, though limited simulation and integration time meant the final performance was less than ideal.
The pandemic further tested our resolve. Our team encountered five separate waves of COVID-19, and there were moments when it seemed no one could keep going. Funding gaps arose, forcing team members to pay out of pocket, and for five to six months we were forced to debug and adjust our robot remotely from various locations. In one instance, a team member was isolated while traveling to a test site, and new university policies even prevented the reimbursement of shipping fees. After a disappointing regional competition and with many teammates ready to give up, I rallied every possible resource—mobilizing friends and professors to help move our equipment off-campus, organizing daily remote meetings that lasted six to seven hours, and maintaining close communication between on-campus and off-campus members. I persisted in appealing to teachers, deans, and administrators, even applying for alternative funding sources (like the Boeing Fund) to cover expenses.
When lacking experience in cost control, I painstakingly contacted dozens of vendors and reached out to peers from different schools until we found the most cost-effective solutions. Even as our regional competition results were only average, I continued to push forward with unwavering determination, ensuring that we finished the season on a high note.
I believe my greatest strengths lie in my fearlessness, resilience, and persistence. I am not the most naturally gifted, but I firmly believe that with the low cost of trial and error today, one must continually experiment and never give up until achieving the desired outcome—whether that outcome is success or failure. I have learned that in an environment that is inherently unsupportive of practical competitions like RoboMaster or RoboCup (where many opt for easier presentation competitions), it is essential to persevere. I approached every laboratory, teacher, and dean with unyielding determination—even if it meant risking expulsion and having to retake entrance exams. For an entire month, I visited different department offices daily until I secured the necessary project approval and received our first 7,000 RMB in funding. Despite countless delays, unresponsive teachers, and even team members who failed to contribute, I gradually built the team from scratch, transforming a non-functional prototype into a robot capable of competing.
Throughout this journey, I have embraced a philosophy of continuous learning: if I don’t know something, I can learn it, and there is no shame in asking for help—even if it means overcoming my pride or offering incentives. Broadly casting the net to gather knowledge and stepping out of my comfort zone has allowed me to seize every opportunity. I have also learned the importance of empathy—considering what value I can offer to others and understanding their motivations—to swiftly resolve conflicts and enhance collaboration.
On the downside, I initially struggled with impatience, greed, and a touch of laziness. In my first competition year, while managing the RoboMaster project, I also took on an underwater robot project for an innovation contest and participated in the Challenge Cup while serving as operations lead. The convergence of final exams, regional competition defenses, and provincial contest defenses led to significant losses, as juggling multiple responsibilities proved unsustainable. This experience taught me the vital lesson that to truly excel, one must focus wholeheartedly on a single endeavor and recognize that personal energy is limited.
Over the years, I have amassed extensive experience in robotics competitions and projects, ranging from mechanical assembly to the development and debugging of embedded systems and algorithms. The RoboMaster events in 2022 and 2023, in particular, significantly honed my organizational, project management, and teamwork skills. I delved into vision development and multi-sensor fusion, and explored operating systems (such as Linux), edge computing devices, industrial cameras, and LiDAR—gaining profound insights into the autonomous driving industry. In embedded systems, I worked with my team to implement basic control algorithms and adjust parameters, acquainting myself with industry practices. On the mechanical side, I mastered a variety of open-source structures, lightweight designs, and adaptive suspension systems, realizing that many algorithmic and control challenges can be addressed through mechanical solutions. Additionally, my interactions with processors and suppliers enriched my understanding of CNC machining and 3D printing, and helped me establish an affordable, effective machining supply chain with support from industry professionals.
Each achievement along this path bolstered my confidence and spurred me to push even harder. Ultimately, by consolidating every resource available to me and uniting multiple schools, I led my team and laboratory onto the stage of a national super-competition in 2023—earning prestigious awards and national recognition.
Just as it seemed I had finally realized my long-held dream, fate dealt me a heavy blow. Collaborators with whom I had built the team and company betrayed me for their own gain, colluding with adversaries to sabotage both me and my friends. The resulting losses were immense, and our laboratory collapsed. We eventually had to leave the lab, and I felt as devastated as Steve Jobs did when he was ousted from Apple. As if that were not enough, during this tumultuous period, my dearest relative—my grandfather, who raised me—was diagnosed with terminal liver cancer. His condition deteriorated rapidly, and with no one to care for him, I was informed that he had only a few days left. Overwhelmed by despair, I was forced to return home to recuperate and care for him, putting my studies on hold.
Journey to the HKUST and ZJU
Click image to enlarge




Once my family’s situation stabilized, however slightly, I refused to abandon my passion for robotics. I managed to maintain my cybersecurity major without failing while still clinging to my robotics dreams. During this period, I was fortunate enough to attend a summer camp at the Hong Kong University of Science and Technology—a true haven for robotics in China—which further reaffirmed my commitment to the field.
Aside from competitions, I have developed a strong desire to explore academic research in robotics and other interdisciplinary fields. For instance, in the realm of unmanned surface vehicles (USVs), I am interested in developing autonomous planning systems that establish dynamics and energy constraints, generate trajectories using hybrid A* or RRT* algorithms, transform path planning into convex optimization problems with time-constrained polynomials, and ultimately optimize trajectories through numerical methods to output control variables. Similarly, when multiple USVs engage in coordinated formation patrols and encirclement, I envision employing multi-agent reinforcement learning for effective control.
Now I am at the Huzhou Research Institute of Zhejiang University working as a Research Assistant in the FASTLAB. I independently designed a lightweight unmanned aerial vehicle (UAV) equipped with four fisheye cameras and developed sophisticated algorithms to enable it to fly at high speeds, navigate autonomously, and perform obstacle avoidance in densely mapped environments. I also designed a Lidar-based aerial-ground UAV capable of autonomous navigation in both aerial and ground scenarios, and researched its communication-constrained autonomous exploration algorithm. Moreover, I deployed the exploration algorithm on this versatile UAV in a DARPA-like subterranean environment for detection and mapping (based on improvements to last year's TRO best paper, RACER). In addition, I implemented various localization algorithms (e.g., FASTLIO, ALOAM, LIO-SAM, VINS-Fusion) on UAVs utilizing both visual-inertial odometry (VIO) and LiDAR-inertial odometry (LIO), enabling them to achieve autonomous flight and obstacle avoidance. I further addressed challenges related to relay nodes and ad-hoc network data transmission in UAV swarm exploration. Furthermore, I researched and deployed mapping and navigation algorithms tailored for uneven terrains on both Ackermann and differential-drive vehicles. My goal is to empower off-road robots to execute high-speed autonomous maneuvers on rugged outdoor surfaces, realizing end-to-end high-speed off-road traversal. Currently, I am exploring the integration of conventional optimization methods, SLAM algorithms, and artificial intelligence. I am actively studying stable diffusion and reinforcement learning, with the aim of implementing and deploying these advanced techniques on quadrupedal and humanoid robots in the near future.
To conclude, I aim to deepen my studies in cybersecurity, computer science, robotics, and path planning—with a particular focus on fundamental theoretical derivation and hands-on academic practice. My undergraduate projects, while formative, have not yet reached the depth I aspire to, so I am eager to engage in more profound research within a supportive academic environment.
I have been fortunate to receive guidance from many remarkable mentors and role models. Their influence has been invaluable to my growth. Among them are Professor Wu Zhijun—whose work earned him a place on the “Lifetime Scientific Influence Ranking (1960-2025)” by Stanford University and Elsevier in October this year—Professor Fei Gao, Professor Chao Xu, and Researcher Yanjun Cao, who have established and lead China's most prestigious UAV and autonomous robotics laboratories, thereby guiding me toward a new direction in life. I have also been inspired by a friend pursuing a PhD in Computer Science at EPFL, and a doctoral student from CMU I met during a winter camp, to name just a few.
Inspired by these mentors, I am determined to keep fighting and push my limits. My ultimate goal after graduation is to work at a university or a research institute, where I will continue to devote myself to scientific research and share my knowledge through teaching. In doing so, I aspire to contribute meaningfully to the advancement of both the industry and society.
Journey to the West: RAS Summer in CTU and ARTS



In July and August 2024, I had the privilege of attending the RAS Summer School organized by MRSLab under the leadership of Prof. Martin Saska at CTU. During the program, I gained valuable insights, particularly into multi-robot swarm localization and UE4-based simulation solutions, both of which greatly piqued my interest. Additionally, I had the pleasure of meeting many inspiring researchers. Beyond academics, I thoroughly enjoyed Prague’s delightful cuisine and world-renowned beer. Later, in December 2024, I participated in the Autonomous Robot Technology Symposium (ARTS), hosted by our FASTLAB. A highlight was attending the keynote lecture by Prof. Hector Garcia de Marina from Spain, who shared cutting-edge advancements in swarm robotics.
Journey still continues...